





| 详细参数 | |||
|---|---|---|---|
| 品牌 | 其他 | 型号 | AB-ABR-VRB |
| 适用范围 | 工业用 | 极数 | 4极 |
| 定子相数 | 两相 | 转子结构 | 绕线式 |
| 机壳保护方式 | 防护式 | 加工定制 | 是 |
| 额定功率 | 6-200W | 额定转速 | 90-1400r/min |
| 额定电压 | 220-380V | 额定电流 | 1-10A |
| 额定频率 | 50-60HZ | 额定转矩 | 1-15N.M |
| 效率 | 95-99% | 功率因数 | 68 |
| 绝缘等级 | IP65 | 防护等级 | IP55 |
| 产品认证 | 3CCE | 噪声 | 50FB |
| 外形尺寸 | |||
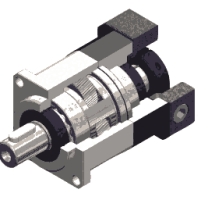
精密伺服行星减速机是一种新型的传动机构,它将伺服马达的高扭矩输出功能和行星齿轮机构的高传动效率相结合。由于其高精度、高扭矩和率的特性,这种减速机在许多行业中都有广泛的应用。
在机器人领域,精密伺服行星减速机被广泛用于控制关节的转动。由于机器人需要快速、准确地进行角度和位置的调整,因此需要能够提供高扭矩输出的装置。精密伺服行星减速机能够满足这一需求,其高精度的定位性能和高扭矩的输出能力使得机器人的动作更加灵活,。
在自动化设备领域,精密伺服行星减速机也有着广泛的应用。例如,在半导体制造设备中,精密伺服行星减速机被用于控制晶片的切割速度,以保证切割的精度和效率。在设备中,它则被用于控制手术器械的运动,以提供的操作。
在航天领域,精密伺服行星减速机也有着重要的应用。它被用于控制飞机的发动机,以保证飞机的安全和稳定。此外,它也被用于控制航天器的推进器,以实现的导航和定位。
在精密机床领域,精密伺服行星减速机能够提供高精度的位置控制,以满足高精度加工的需求。例如,在数控机床中,它被用于控制刀具的位置,以实现的切削。
总的来说,精密伺服行星减速机凭借其高精度、高扭矩和率的特性,在许多行业中都有着重要的应用。随着科技的发展,我们可以预见到这种减速机的应用将会更加广泛。
宣化镇AF142-L1-P2-S2-35-114.3-200-M12联轴步进减速器
VRB-140-3-S3-38KA35
VRB-140-4-S3-38KA35
VRB-140-5-S3-38KA35
VRB-140-6-S3-38KA35
VRB-140-7-S3-38KA35
VRB-140-8-S3-38KA35
VRB-140-9-S3-38KA35
VRB-140-10-S3-38KA35
VRB-140-15-S3-38KA35
VRB-140-16-S3-38KA35
VRB-140-20-S3-38KA35
VRB-140-25-S3-38KA35
VRB-140-28-S3-38KA35
VRB-140-30-S3-38KA35
VRB-140-35-S3-38KA35
VRB-140-40-S3-38KA35
VRB-140-45-S3-38KA35
VRB-140-50-S3-38KA35
VRB-140-60-S3-38KA35
VRB-140-70-S3-38KA35
VRB-140-80-S3-38KA35
VRB-140-90-S3-38KA35
VRB-140-100-S3-38KA35
VRB-140-3-S3-28HA22
VRB-140-4-S3-28HA22
VRB-140-5-S3-28HA22
VRB-140-6-S3-28HA22
VRB-140-7-S3-28HA22
VRB-140-8-S3-28HA22
VRB-140-9-S3-28HA22
VRB-140-10-S3-28HA22
VRB-140-15-S3-28HA22
VRB-140-16-S3-28HA22
VRB-140-20-S3-28HA22
VRB-140-25-S3-28HA22
VRB-140-28-S3-28HA22
VRB-140-30-S3-28HA22
VRB-140-35-S3-28HA22
VRB-140-40-S3-28HA22
VRB-140-45-S3-28HA22
VRB-140-50-S3-28HA22
VRB-140-60-S3-28HA22
VRB-140-70-S3-28HA22
VRB-140-80-S3-28HA22
VRB-140-90-S3-28HA22
VRB-140-100-S3-28HA22
宣化镇AF142-L1-P2-S2-35-114.3-200-M12联轴步进减速器

伺服行星减速机回程间隙和背隙的区分
一、引言
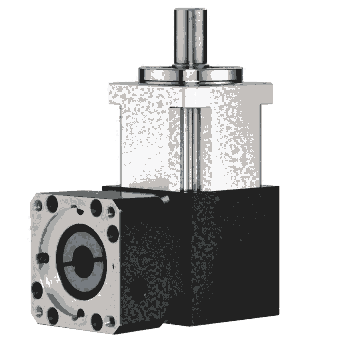
伺服行星减速机是一种精密的传动装置,广泛应用于各种机械领域。在伺服行星减速机的使用过程中,回程间隙和背隙是两个重要的技术参数,直接影响到设备的传动精度和使用寿命。本文将阐述伺服行星减速机回程间隙和背隙的区分方法。
二、回程间隙
回程间隙是指伺服行星减速机在正反转传动过程中,主动件与从动件之间齿轮啮合的间隙。这个间隙的存在可以允许齿轮在运转过程中有一定的回转角度,从而适应不同的传动需求。回程间隙的大小取决于齿轮的设计和制造精度,以及减速机的装配精度。在选择伺服行星减速机时,回程间隙的大小是一个重要的技术指标,过大或过小的回程间隙都会对设备的性能产生不利影响。
三、背隙
背隙是指伺服行星减速机在输出轴固定不动的情况下,主动件能够旋转的大角度。这个角度通常用输出轴相对于主动件的旋转角度来表示。背隙的存在是为了防止齿轮在运转过程中卡死,导致设备损坏。在选择伺服行星减速机时,背隙的大小也是一个重要的技术指标,过大或过小的背隙都会对设备的性能产生不利影响。
四、回程间隙和背隙的区分
定义不同:回程间隙是指主动件与从动件之间齿轮啮合的间隙,而背隙是指输出轴固定不动时,主动件能够旋转的大角度。
产生原因不同:回程间隙是由于齿轮制造误差和装配误差而产生的,而背隙是由于设计因素和齿轮制造误差而产生的。
对设备性能的影响不同:回程间隙的大小直接影响到设备的传动精度和使用寿命,而背隙的大小主要影响到设备的启动性能和调速性能。
调整方法不同:回程间隙可以通过调整齿轮的啮合位置、更换齿轮或调整装配精度等方法进行调整,而背隙可以通过调整主动件和从动件的相对位置、更换齿轮或调整设计因素等方法进行调整。
重要性不同:在选择伺服行星减速机时,回程间隙的大小更为重要,因为它直接影响到设备的传动精度和使用寿命。而背隙的大小则在满足设备使用要求的前提下,不应过大或过小。
五、结论
综上所述,伺服行星减速机的回程间隙和背隙是两个不同的技术参数,它们在产生原因、对设备性能的影响、调整方法和重要性等方面存在差异。正确区分回程间隙和背隙对于选择和使用伺服行星减速机具有重要意义,有助于提高设备的传动精度和使用寿命。

宣化镇AF142-L1-P2-S2-35-114.3-200-M12联轴步进减速器